
Over the weekend I prototyped a tool for tattooing with a robot arm.
I think the idea got in my head almost ten years ago when I saw this project by two French designers named Pierre Emm and Johan da Silveira at Autodesk’s Pier 9 where they used a big industrial robot arm to make some tattoos. They had previously modified a Makerbot 3D printer to make tattoos.
What would it take to make a good tattoo with a machine? At least:
Judging by photos and videos, it looks like the general approach that Pierre and Johan took was to start with a motion system that could get the tattoo gun to follow a path which they precomputed. They added a contact sensor to provide feedback about where the skin is and how deep the needles were going. On the robot arm they also had an extra linear motion stage at the end which could move the gun towards or away from the skin. Maybe they were using that to adjust the depth of the needles in real-time based on feedback from their contact sensor, or maybe it was just helping to execute the preplanned motion.
Other examples of solutions for the same kinds of problems can be found in the surgical robotics space. A high profile example is the Neuralink R1 surgical robot, which also repeatedly stabs needles into a person. But in that context it’s inserting flexible electrodes into a brain. Still, the problems are similar. That system has target locations it needs to reach relative to a squishy, moving, living surface. They can’t restrain the motion so the system needs to judge where the surface is continuously and update its plan. In the video I linked it’s mentioned that it uses an “OCT-based” system to get data about the structure of the brain surface 21 times per second. OCT = Optical Coherence Tomography.
Humans are really good at learning to do these sorts of tasks. Artists, craftspeople, surgeons, athletes, and etc. can do incredibly subtle things with their eyes, hands, and brains. They adjust how they hold a tool to make the best use of their body kinematics for controlling it, or understand how wet a brush is by how the paint on it reflects light, or adjust their carving design on the fly to make use of a knot in the wood they found while working. Usually these skills aren’t the kind of knowledge that is taught. Maybe some words of wisdom help them start on the right solution manifold, but the fine details come wordlessly through practice. Some of it may physically live outside the brain in the limbs, hands, and skin. Shadows of the tools a person uses start amalgamating into the body plan they have for themselves in their mind.
I’m in awe of the embodied intelligence humans are so rich with. My crude attempt at mimicry here is a partly a tribute to it and partly another small step toward getting an understanding of it for myself.
In the past I’ve worked on a bunch of painting machines, and trying to paint with robot arms (like you can see in this video reel). I’ve tried adjusting the pressure on a brush by adapting the motion of a gantry or robot arm directly in real-time using sensor feedback. A common problem is that the motion planner for the primary motion system is something off-the-shelf that’s not designed to incorporate real-time feedback. On a gantry you can hack around this by disconnecting the last axis from the main motion controller and using an independent system for the closed-loop control. With a robot arm you usually don’t want to mess with the robot’s internals so it’s easier to add an extra motion stage that you can connect to your closed loop controller. That’s like what Pierre and Johan did with the robot arm at Pier 9. I’m going to try the same.
I wanted to work quickly with what I had on hand, so I came up with a design for the prototype piece-meal by junk bin diving. I found a geared DC motor, rack, and small linear slide rail to build a fast linear motion stage with. The robot arm would be in charge of getting the tattoo gun close to the person and keeping it pointing normal to the skin surface. The linear motion stage would then be able to quickly adjust the depth based on feedback from some kind of sensor.
For the sensor I needed something very accurate and reliable. My assumption is that fractions of a millimeter matter for the tattooing depth, so my sensor would need to have at least that kind of resolution. The need for reliability ruled out sensors I might otherwise reach for, like ultrasound, light-based ToF, or capacitive distance sensors. I didn’t want anything that might be fooled by interference, odd shapes, reflections, or liquid. Instead I decided to have something touch the surface of the skin. By seeing how much it was displaced I would be able to figure out the current depth. But how to measure the displacement? I wanted something very simple and easy to make with as few moving parts as possible. I settled on using a 3D printed flexure structure with a little light blocking section sticking into a break-beam light sensor.
Here’s the prototype I made to test the idea:
I really like flexures because they are easy to make with 3D printers and laser cutters. They don’t have any parts that rub against each other so they don’t wear out quickly.
With the sensor PoC working I moved onto wrapping it around the tattoo gun I bought:
This one took a couple of rounds of adjustment to get right. The flexure needed to be thin so the force required to displace it would be small, but that made it so it was hard to clean the support material from the 3D print without damaging it. At first the internal diameters were too small so it flexed outward when I put it on the tattoo gun, and that shifted the little flag relative to the break-beam sensor causing it to not be centered. But after a few tweaks it was working pretty well.
Next I moved onto the full assembly with a linear motion stage:
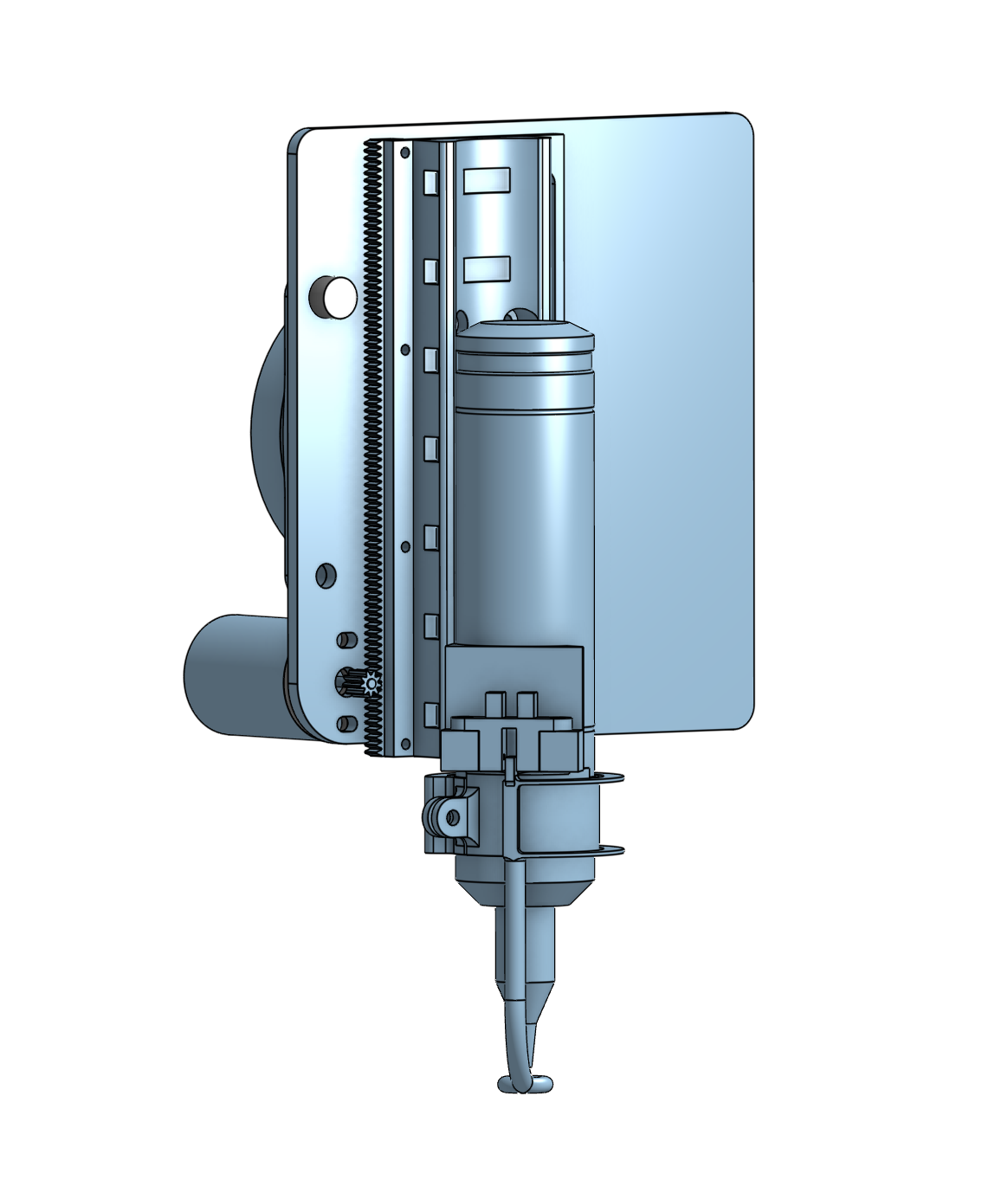
3D printed and assembled on a UR5 robot arm with a simple untuned PID-loop:
It’s sorta working! But it’s going to need more iterations before it’s usable for tattooing.
Deficiencies to resolve:
In my mind the closed loop tool system is the hard part of this project. With that in hand the overall workflow will look like:
I already did a mock of steps 1-4 before I started working on the tool system. Here I am using Houdini to do the tool path manipulation relative to the 3D scan:
Comments
To leave a comment, you need an Are.na account. Comment on this post’s Are.na block and it will appear here.